Computer Graphics
컴퓨터 그래픽스 11장 - 오일러 변환과 쿼터니언 -
전유댕
2024. 5. 14. 00:54
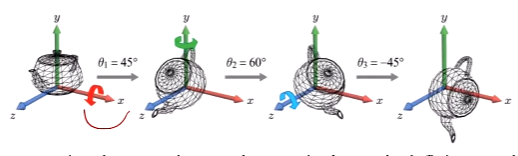


Keyframe Animation

오일러 변환은 Keyframe animation에 적합하지 않음(휘어지는 문제)
쿼터니온 Quaternion, 4원수


회전할 좌표 (x, y, z)가 허수부 p로 설정됨. 쿼터니온식은 ({x,y,z}, 0)임 - 앞은 허수부, 뒤는 실수부
q는 회전축 u와 회전할 각도 세타의 조합으로 만들어짐
p*는 p의 켤레 쿼터니온
-> qpq*이 곧 회전된 벡터값을 가짐
쿼터니온은 x, y, z축에 한정되지 않고 어떤 축에 대해서도 계산이 가능함
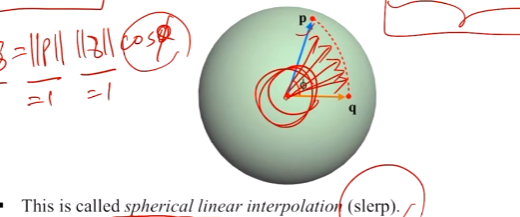
Interpolation of Quaternions

Quarternion
보간 시 이상해지는 오일러 변환과 달리 쿼터니온은 slerp이라는 보간을 통해 잘 이루어짐
keyframe에 더 유리함