-
컴퓨터 그래픽스 11장 - 오일러 변환과 쿼터니언 -Computer Graphics 2024. 5. 14. 00:54

임의의 축을 주축으로 회전시키는 것을 오일러 변환이라고 부름 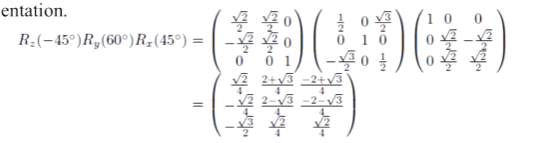
위 식의 계산 과정 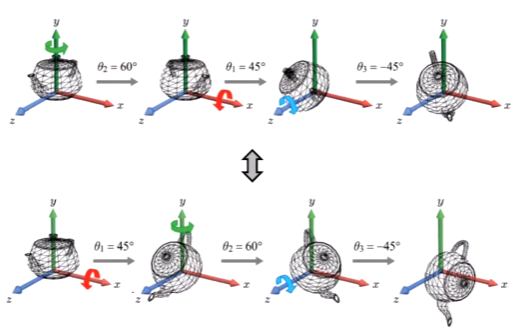
순서를 바꿔 시도하면 다른 형태가 나옴 Keyframe Animation

선형 보간을 통해 위치와 회전값을 구함 (선형 보간이 아닌 2차, 3차 함수로 보간 가능함, 부드러워짐) 오일러 변환은 Keyframe animation에 적합하지 않음(휘어지는 문제)
쿼터니온 Quaternion, 4원수
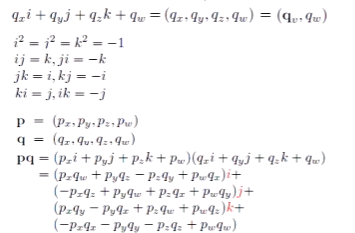

회전할 좌표 (x, y, z)가 허수부 p로 설정됨. 쿼터니온식은 ({x,y,z}, 0)임 - 앞은 허수부, 뒤는 실수부
q는 회전축 u와 회전할 각도 세타의 조합으로 만들어짐
p*는 p의 켤레 쿼터니온
-> qpq*이 곧 회전된 벡터값을 가짐
쿼터니온은 x, y, z축에 한정되지 않고 어떤 축에 대해서도 계산이 가능함
Interpolation of Quaternions


slerp이라고 부름 Quarternion
보간 시 이상해지는 오일러 변환과 달리 쿼터니온은 slerp이라는 보간을 통해 잘 이루어짐
keyframe에 더 유리함
'Computer Graphics' 카테고리의 다른 글
컴퓨터 그래픽스 10장 - 출력 병합 - (0) 2024.05.11 컴퓨터 그래픽스 9장 - 라이팅- (2) 2024.05.04 컴퓨터 그래픽스 8장 - 이미지 텍스처링 - (0) 2024.05.04 컴퓨터 그래픽스 7장 - 래스터라이저 - (1) 2024.04.29 컴퓨터그래픽스 6장 - OpenGL ES와 셰이더 - (2) 2024.04.29